Breaking Boundaries: Unveiling the Possibility of 2D Teleportation from a Navigation Perspective Скачать
10. Автоматизована обробка аеронавігаційних даних. Зважене поєднання даних від різних сенсорів 02 Скачать
09. Автоматизована обробка аеронавігаційних даних. Зважене поєднання даних від різних сенсорів Скачать
05. Автоматизована обробка аеронавігаційних даних. Детектування корисного сигналу на фоні завад Скачать
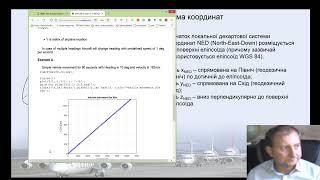
03. Автоматизована обробка даних. Переведення похибок з полярної до прямокутної системи координат Скачать
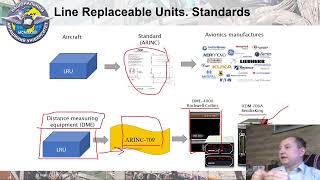
Avionics. On-board equipment of civil aircraft. 08 Digital Data Bases. MIL STD 1553, ARINC 629 Скачать
02. Автоматизована обробка аеронавігаційних даних. Автоматизована обробка серії повідомлень METAR Скачать
Avionics. On-board equipment of civil aircraft. 02 Historical development of Avionics equipment Скачать
Авіоніка. Обладнання повітряних кораблів. 08 Канал інформаційного обміну MIL STD 1553 та ARINC629 Скачать
Авіоніка. Обладнання повітряних кораблів. Прискорений курс лекцій. 05 Інтегрована модульна авіоніка Скачать
и как работать с таким напряжением сети? вот для этого и нужен автоматический переключатель фаз Скачать
Компактний формат координат місцеположення та даних геолокації | Автоматичне залежне спостереження Скачать
Flight Management System. Performance of VOR/DME navigation and positioning aided by altimeter data Скачать
Кодування цифрового повідомлення про положення літального апарату у форматі ADS-B авто зал спо1090ES Скачать
ADS-B Кодування і декодування цифрового повідомлення ідентифікації літаючого засобу у режимі 1090ES Скачать
Структура цифрового повідомлення за концепцією Автоматичного залежного спостереження ADS-B 1090ES Скачать
Аналіз вибору ефективної пари далекомірного і кутомірного обладнання під час польоту літака у MATLAB Скачать
Вибір оптимальної пари радіонавігаційних засобів при позиціонуванні за DME/DME, VOR/VOR, VOR/DME. Скачать
Розрахунок параметрів траєкторії літака за даними автоматичного залежного спостереження ADS-B Скачать
Метод позиціонування за парою кутомірно-далекомірного обладнання (VOR/DME) у прикладах в MATLAB Скачать
Позиціонування літального апарату за парою далекомірного обладнання у практичних прикладах MATLAB Скачать
Візуалізація конфігурації мережі наземних радіонавігаційних засобів у програмному забезпечені MATLAB Скачать
ADS-B Airplane trajectory data processing with MATLAB. Automatic Dependent Surveillance–Broadcast Скачать
Threshold value selected based on minimization of target omission and false alarm probabilities Скачать
Укладка керамогранита снаружи. Обкладываем крыльцо с использованием системы выравнивания плитки Скачать
Автоматический переключатель Фаз. Пример использования PS-63 в распределительном щитке на три фазы Скачать