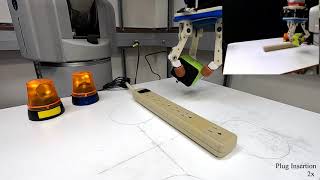
Towards Generalized Robot Assembly through Compliance-Enabled Contact Formations Yale Grablab 685 подписчиков Скачать
Model Predictive Actor-Critic: Accelerating Robot Skill Acquisition with Deep Reinforcement Learning Скачать
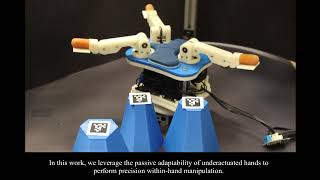
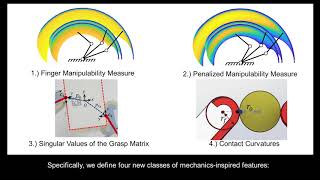
Towards Generalized Manipulation Learning through Grasp Mechanics-based Features & Self-Supervision Скачать
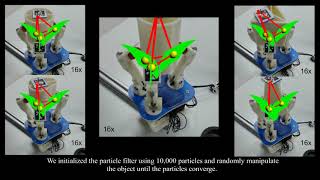
Hand-Object Configuration Estimation using Particle Filters for Dexterous In-Hand Manipulation Скачать
Learning from Transferable Mechanics Models: Generalizable Online Mode Detection in Manipulation Скачать
Design and evaluation of shape-changing haptic interfaces for pedestrian navigation assistance Скачать