PIETRA: Physics-Informed Evidential Learning for Traversing Out-of-Distribution Terrain AerospaceControlsLab 16,9 тыс. подписчиков Скачать
Efficient Deep Learning of Robust Policies from MPC via Imitation and Tube-Guided Data Augmentation Скачать
Experimental Results for "Efficient Learning of Adaptive Policies via Tube-Guided Data Augmentation" Скачать
[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align Скачать
[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments Скачать
Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons Learned Скачать
Robust MADER: Decentralized Multiagent Traj Planner Robust to Comm Delay in Dynamic Environments Скачать
(ICRA) Robust MADER: Decentralized and Asynchronous Multiagent Traj Planner Robust to Comm Delay Скачать
Robust Trajectory Tracking on Insect-Scale Soft-Actuated Aerial Robots with Deep-Learned Tube MPC Скачать
ICRA 2021: Efficient Reachability Analysis of Closed-Loop Systems with Neural Network Controllers Скачать
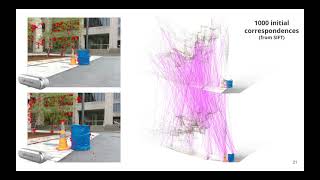
ICRA 2020 workshop on "Emerging Learning and Algorithmic Methods for Data Association in Robotics" Скачать
[Ground Robot Sim] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments Скачать
[Extended Version] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments Скачать
ICRA 2019: Real-Time Planning with Multi-Fidelity Models for Agile Flights in Unknown Environments Скачать
Predictive Positioning and Quality Of Service Ridesharing for Campus Mobility On Demand Systems Скачать
Semantic-level Decentralized Mult-Robot Decision-Making using Probabilistic Macro-Observations Скачать
MIT ACL - Closed-Loop RRT for UAV Navigation in Dynamic Environments - Emulated Obstacle Avoidance Скачать





![[ICRA24] PUMA: Decentr. Uncertainty-aware Multiagent Traj. Planner w/ Image Segmentation Frame Align](https://s2.save4k.su/pic/W73p42XRcaQ/mqdefault.jpg)
![[Presentation] Deep-PANTHER: Learning-Based Perception-Aware Traj. Planner in Dynamic Environments](https://s2.save4k.su/pic/zlMxuSSvo3o/mqdefault.jpg)


































![[Ground Robot Sim] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments](https://s2.save4k.su/pic/L13k44-krcc/mqdefault.jpg)




![[Extended Version] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments](https://s2.save4k.su/pic/fkkkgomkX10/mqdefault.jpg)

![[IROS 2019] FASTER: Fast and Safe Trajectory Planner for Flights in Unknown Environments](https://s2.save4k.su/pic/gwV0YRs5IWs/mqdefault.jpg)