Главная
Клипы
Новинки
Тренды
Популярные
Лайки
Комментарии
Все категории
Музыка
Фильмы
Видеоигры
Транспорт
Животные
Спорт
Путешествия
Люди и блоги
Юмор
Развлечения
Политика
Хобби
Образование
Наука
Организации
Найти
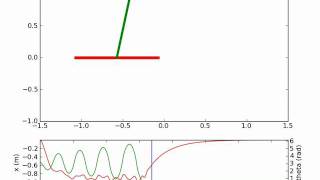
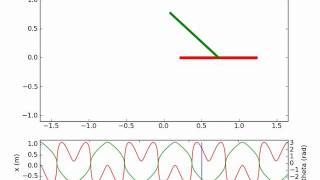
Inverted Pendulum LQR Controller Python
toddsifleet
23 подписчика
Скачать
6 видео с канала:
toddsifleet
Inverted Pendulum LQR Controller Python
Скачать
Arduino Air Horn Alarm
Скачать
Inverted Pendulum modeled in python
Скачать
Inverted Pendulum on Cart
Скачать
Pendulum on Cart
Скачать
Automatic Bike Transmission
Скачать
Канал: toddsifleet
Inverted Pendulum LQR Controller Python
Скачать
Arduino Air Horn Alarm
Скачать
Inverted Pendulum modeled in python
Скачать
Inverted Pendulum on Cart
Скачать
Pendulum on Cart
Скачать
Automatic Bike Transmission
Скачать