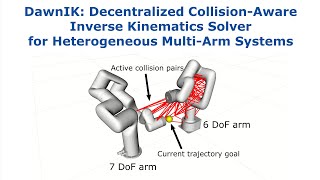
DawnIK: Decentralized Collision-Aware Inverse Kinematics Solver for Heterogeneous Multi-Arm Systems Скачать
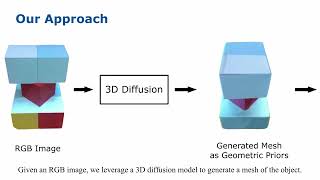
NBV-SC: Next Best View Planning based on Shape Completion for Fruit Mapping and Reconstruction Скачать
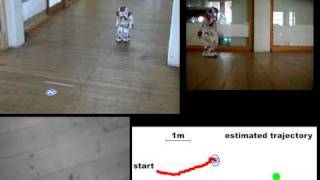
Fast-Replanning Motion Control for Non-Holonomic Vehicles with Aborted A* shown on a Toyota HSR Скачать
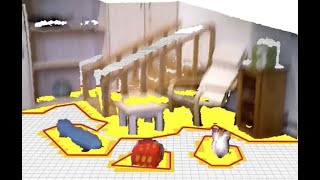
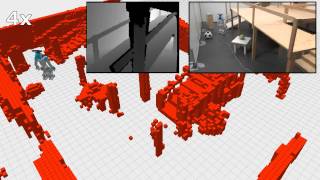
Classifying Obstacles and Exploiting Knowledge about Classes for Efficient Humanoid Navigation Скачать
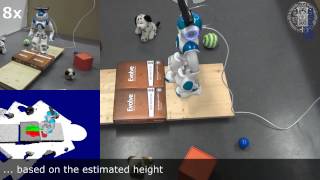
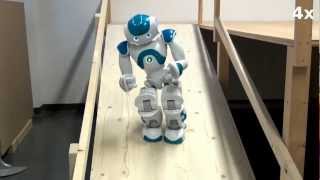
Whole-Body Motion Planning for Manipulation of Articulated Objects with a Nao Humanoid (ICRA 2013) Скачать




![Spatiotemporal Attention for Lidar-Based Robot Navigation [Supplemental Video]](https://i.ytimg.com/vi/cYNUFD_rGNE/mqdefault.jpg)

![Lidar Attention for Subgoal-Driven Robot Navigation [ICAR 2023 Presentation]](https://i.ytimg.com/vi/V8e-YeVt75o/mqdefault.jpg)
![Subgoal-Driven Navigation [Supplemental Video]](https://i.ytimg.com/vi/5TLjNnucpjw/mqdefault.jpg)