Operating at force/power/thermal limits in electrically-actuated commercial legged robots - Avik De IROS 2021 workshop: From gears to direct drive 514 подписчиков Скачать
Operating at force/power/thermal limits in electrically-actuated commercial legged robots - Avik De Скачать
Modelling BLDC motors for the design of lightweight robotic systems: common mistakes - Elliot Rouse Скачать
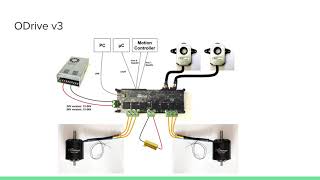
Electronics and software for high performance motor drives for robotics: ODrive - Oskar Weigl Скачать
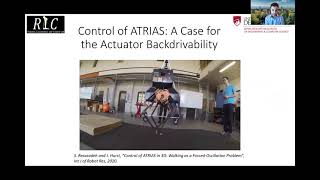
How Quasi Direct Drive Actuators Can Help in Human Like Bipedal Locomotion - Siavash Rezazadeh Скачать
Bilateral Drive Gear : a Highly Backdrivable Reduction Gearbox for Robotics - Yasutaka Fujimoto Скачать