Cooperative Modular Manipulation with Numerous Cable-Driven Robots for Assistive Constructions RoboDesign Lab 761 подписчик Скачать
Cooperative Modular Manipulation with Numerous Cable-Driven Robots for Assistive Constructions Скачать
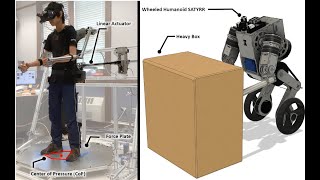
Wheeled Humanoid Bilateral Teleoperation with Position-Force Control for Dynamic Loco-Manipulation Скачать
Shared-Control with Bilateral Feedback for Obstacle Avoidance Telelocomotion of Wheeled Humanoids Скачать
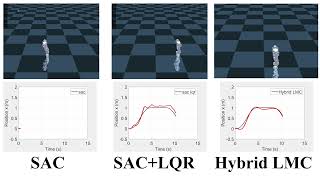
Hybrid LMC: Hybrid Learning and Model-based Control for Wheeled Humanoids via Ensemble Deep RL Скачать
The dynamic effect of mechanical losses of transmissions on the equation of motion of legged robots Скачать
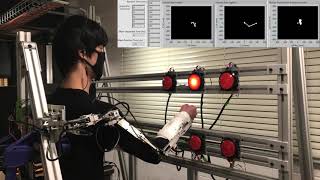
A Comparison Between Joint Space and Task Space Mappings for Dynamic Teleoperation in Reaction Tests Скачать