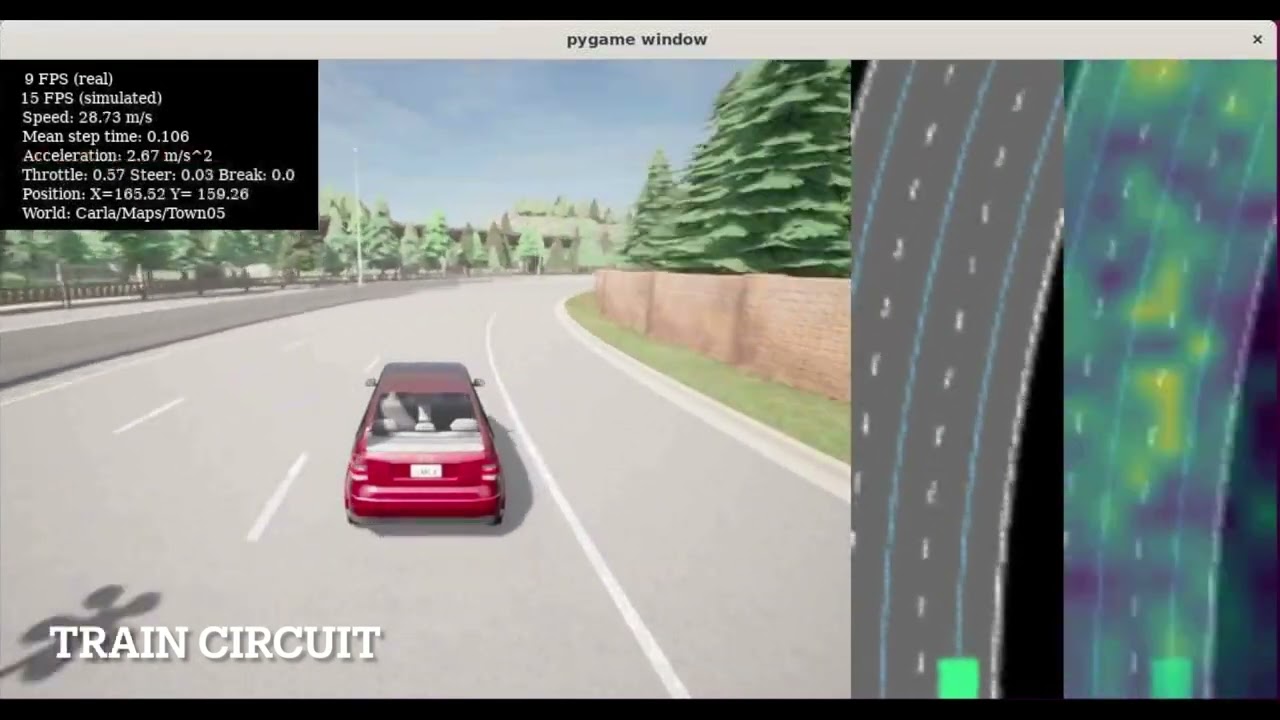
We create a model for driving autonomously that is able to follow the lane using imitation learning and bird-eye view. We train only with 3 circuits and an unrestricted maximum speed in, so we obtain faster behaviors. The model receives the previous speed and the current image when predicting the control commands.
This policy is able to drive in never seen scenarios!
Mor information: [ Ссылка ]



































































![Звуковые иллюзии, которые работают на всех (почти) [Veritasium]](https://i.ytimg.com/vi/8pCuUfbdheE/mqdefault.jpg)

