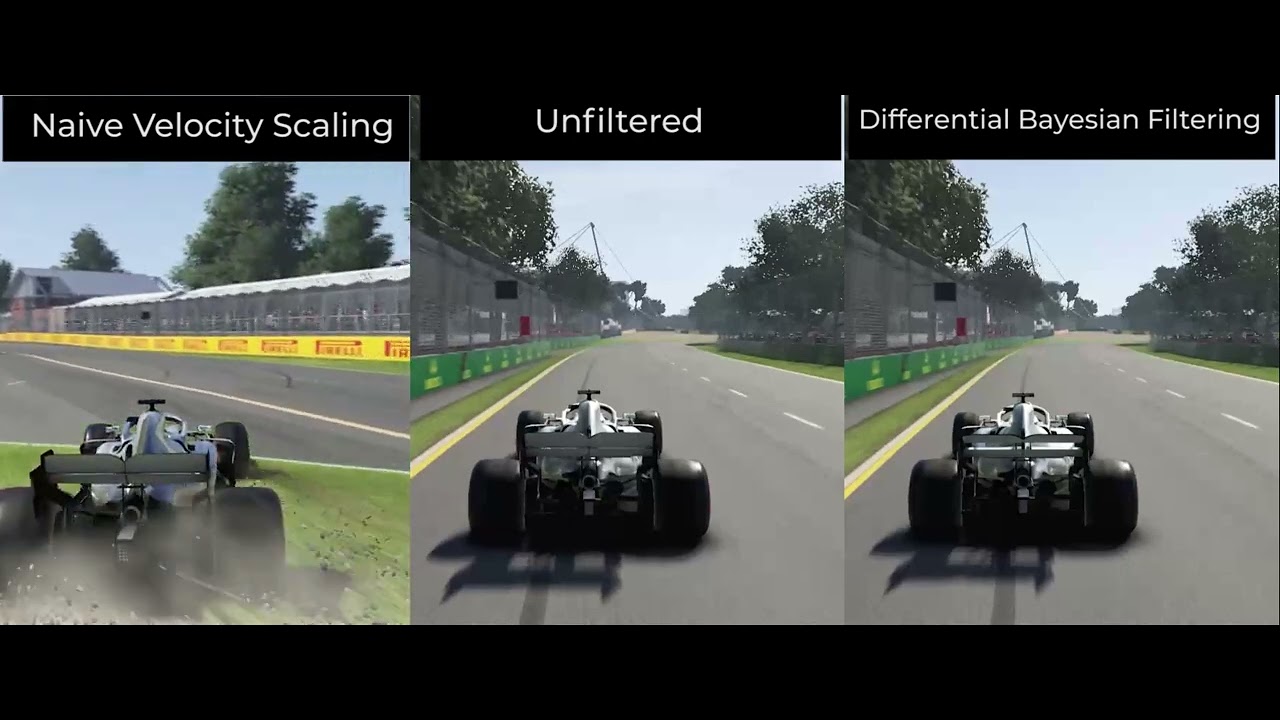
Video accompanying the paper - This is the Way: Differential Bayesian Filtering for Agile Trajectory Synthesis
Authors:
Trent Weiss
Madhur Behl
Department of Computer Science
University of Virginia
We address the limitations of behavioral cloning methods for agile trajectory synthesis by introducing Differential Bayesian Filtering (DBF), which uses probabilistic B'ezier curves as a basis for inferring optimal autonomous racing behavior based on Bayesian inference and a formal notion of the trajectory's differential properties. We evaluate the performance of the proposed approach on the DeepRacing Formula One simulation testbed and compare it with several other trajectory synthesis approaches for autonomous racing as well as human driving performance. We find that DBF results in the fastest lap time, and the fastest speed on the track while pushing the racing car closer to its limits of control.