I bought a Fimi X8 mini V2 drone at the end of June 2023. As soon as I received the drone I updated it to the latest software version available. I made a first flight without encountering any problems.
On 7/29 I flew in a mountain area, in very good weather conditions, with excellent GPS coverage (no obstacles or shaded areas). After about 6 minutes of flying, I brought the drone back to me to prepare it for a manual landing. I had the drone a few meters above me, it was hoovering when suddenly and without a input from me on the remote it went forward at maximum speed, crashing a few meters ahead against a rock wall. I tried to oppose the drone's initiative with the remote control, full pitch down, but the drone did not respond to the commands. The crash caused the gimbal break and some scratches to the drone.
Imagine if that happened in an area with lots of people. I've had the first version of this model for a year and I've never had this problem.
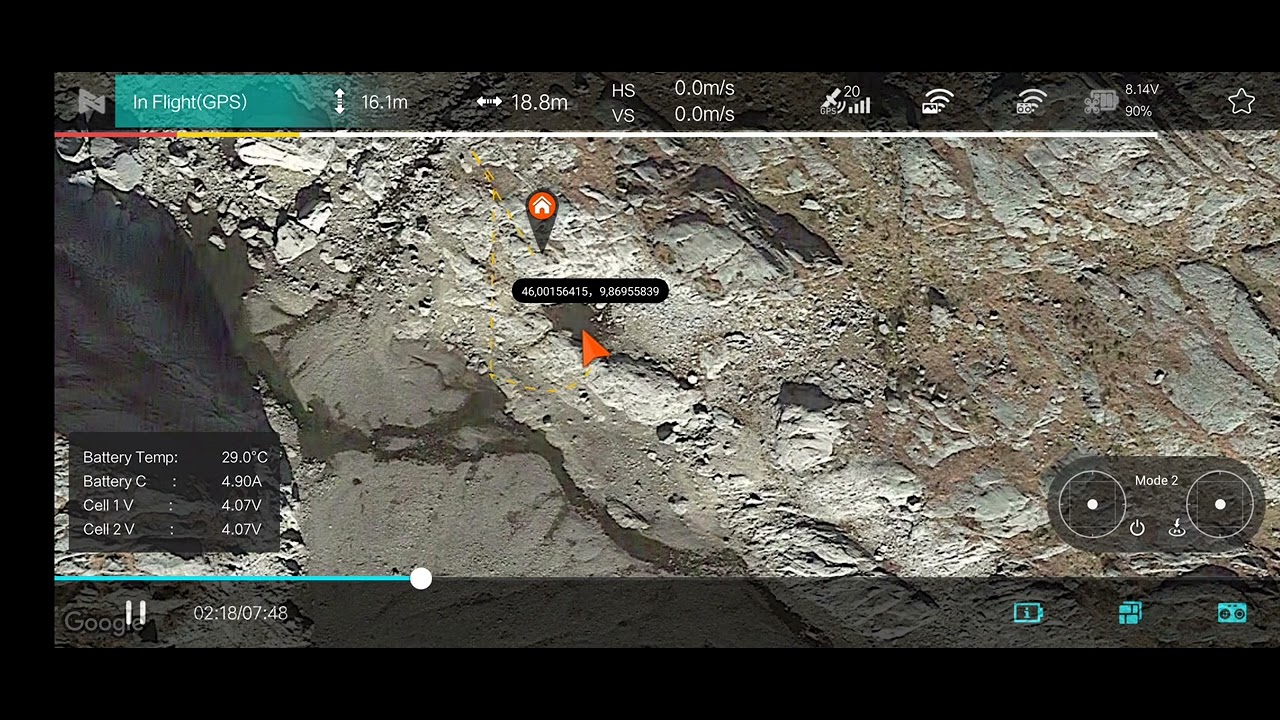
This is the recordered Flight Log and you can clearly see the described initiative of the drone (@7:44) and my recovery attempt (@7:45) and the lack of response from the drone itself.
Also, the next day I turned on the drone to check the damage, and after arming the engines the drone took off immediately in the air without my input, injuring my finger.
As per Fimi support, "when the drone suffered from impact force, the joystick was operated by the user. The drone crashed under the user's operation, so the crash accident was caused by the user's improper operation.", and "According to the flight record video, when the user operated joystick, the flight distance and flight height in the APP screen was changed, so the drone was responding the RC's command", and the most hilarious part: "7:45 in video (6:47 in flight record), 5.9m distances, started fully pulled down pitch joystick; till 7:46 in video (6:48 in flight record), the drone flew away fast until flying to 14.1m distances (from 5.9m distance to 14.1m distance); at this time, the user immediately pushed up full pitch joystick for 1S, tried to prevent that the drone flew too fast and tried to avoid that the drone hit to object, however, due to the flight speed of the drone was too fast before, the distance was not enough to descend speed and respond joystick's command, caused that the drone hit to object directly. Such situation indicated that the user's operation skill is not enough good."
So, as per Fimi's support team, if we fully pull down the pitch joystick the drone is supposed to go forward in the head direction. If we push up full pitch joystick the drone is supposed to go backward. AND I AM THE ONE WHOSE OPERATION SKILLS ARE NOT ENOUGHT GOOD. OK FIMI!!!
I've tried to explain several times to Fimi's support about the flyaway of this drone, but for some obscure reason they are pretending not to see the reality of the facts and to blame exclusively on me. The entire scene was observed by more than 20 people, with all the associated risks of serious personal injury.
I would be grateful if you could give me your kind interpretation of what happened here starting from the testimony of the flight log. Thanks!























































![PCP SEMIAUTO SIAP BLUSUK❗ REKOMENDASI SENAPAN SEMI AUTO TERBAIK BERKUALITAS SUPERR❗[AGS]](https://i.ytimg.com/vi/64PGiHsagQY/mqdefault.jpg)

















