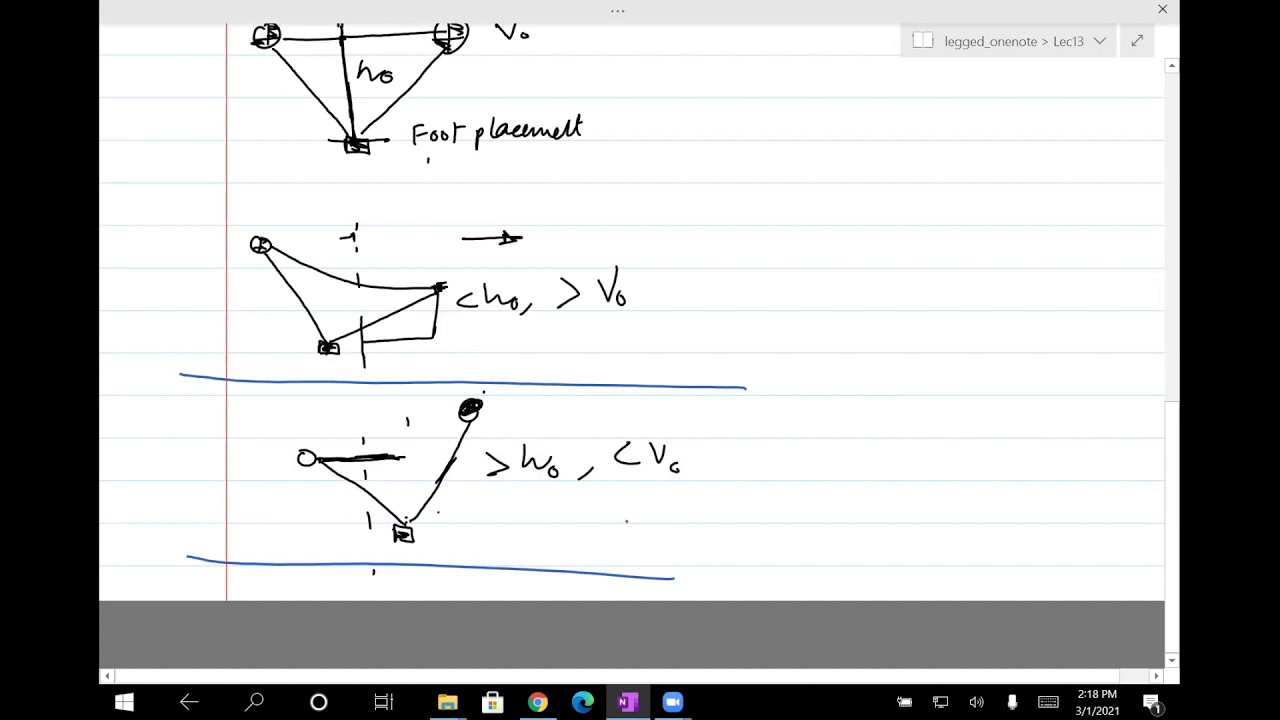
I derive the expression for Raibert foot placement control. Then I modify the slipHopper.m file that I created for fixed point/eigenvalues to include Raibert control. I get stuck at 33 min and eventually find the issue at 45.05 (you can skip these 12 min). I included these minutes to show the perils of coding; sometimes its not so obvious where the error is.