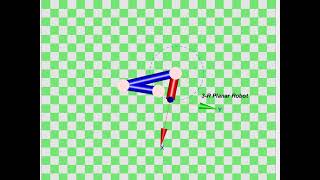
This video shows kinematic simulation of 3R planar manipulator robot in MATLAB for tracking circular trajectory by applying open-loop redundancy resolution method of augmented task-space with an imposed auxillary constraint on the configuration-space variable(s) stating that the velocity of second and third joint of the manipulator robot should be opposite with respect to each other (i.e., they should add up to zero).
GitHub Repository: [ Ссылка ]

























































![¿EL FIN DE LA MINERIA? - ETHEREUM 2.0 - PatagoniaMining [4K]](https://i.ytimg.com/vi/1s06p9jZXnM/mqdefault.jpg)