Authors: Dinesh K. Patel, Xiaonan Huang, Yichi Luo, Mrunmayi Mungekar, M. Khalid Jawed, Lining Yao, Carmel Majidi
Link to the paper: [ Ссылка ]
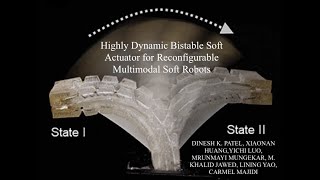
Abstract: Matching the rich multimodality of natural organisms, i.e., the ability to transition between crawling and swimming, walking and jumping, etc., represents a grand challenge in the fields of soft and bio-inspired robotics. Here, a multimodal soft robot locomotion using highly compact and dynamic bistable soft actuators is achieved. These actuators are composed of a prestretched membrane sandwiched between two 3D printed frames with embedded shape memory alloy (SMA) coils. The actuator can swiftly transform between two oppositely curved states and generate a force of 0.3 N through a snap-through instability that is triggered after 0.2 s of electrical activation with an input power of 21.1 ± 0.32 W (i.e., electrical energy input of 4.22 ± 0.06 J. The consistency and robustness of the snap-through actuator response is experimentally validated through cyclical testing (580 cycles). The compact and fast-responding properties of the soft bistable actuator allow it to be used as an artificial muscle for shape-reconfigurable soft robots capable of multiple modes of SMA-powered locomotion. This is demonstrated by creating three soft robots, including a reconfigurable amphibious robot that can walk on land and swim in water, a jumping robot (multimodal crawler) that can crawl and jump, and a caterpillar-inspired rolling robot that can crawl and roll.