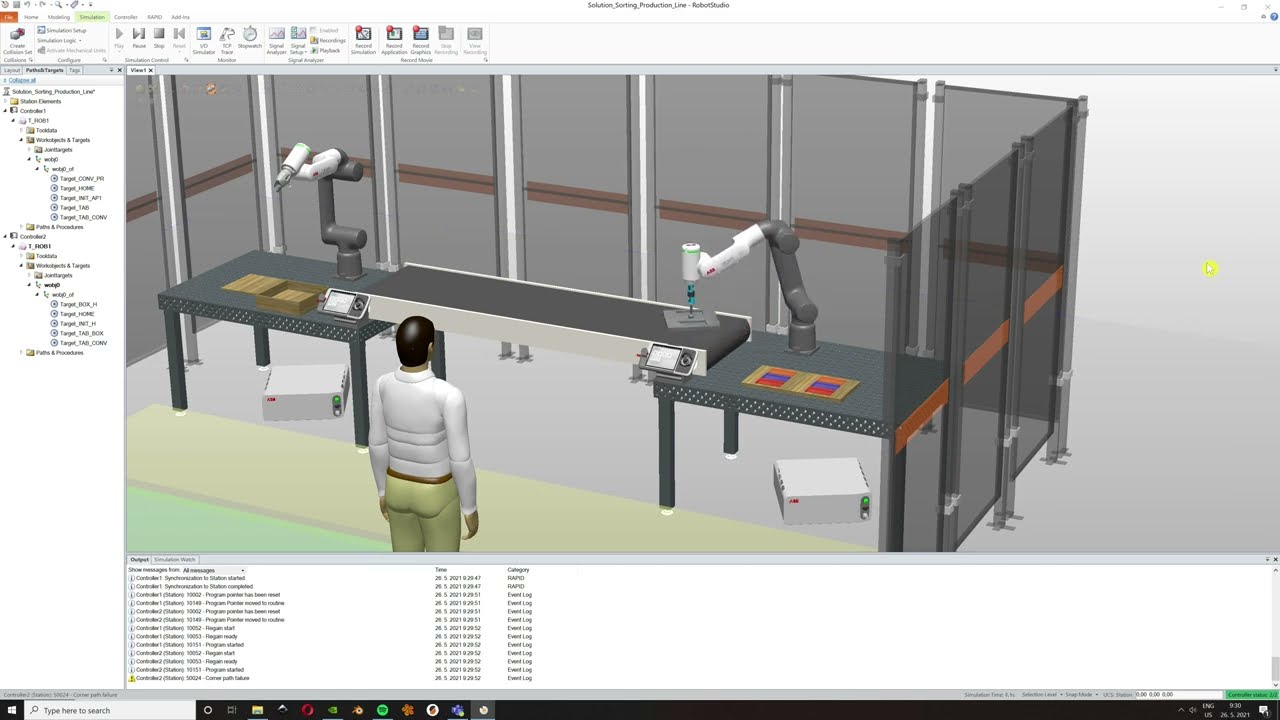
The project focuses on controlling multiple robots using the simulation tool RobotStudio ABB. Robot on table no. 1 communicates with another robot on table no. 2 using a conveyor belt. The main goal of the project is to create a simple sorting production line.
Main challenges of project implementation:
- object manipulation using a smart gripper (ABB), simple vacuum gripper
- data communication between the multiple robotic arms
- conveyor belt control
- clean rapid program using functions, structures, etc.
The project was created to improve the VRM (Programming for Robots and Manipulators) university course.
Information about the project can be found at (GitHub):
[ Ссылка ]
Contact:
Roman.Parak@outlook.com
Institute of Automation and Computer Science:
[ Ссылка ]
Tags:
#DigitalTwin #RobotStudio #ABB #Robotics #Simulation #Education #GoFa #IRB #Automation