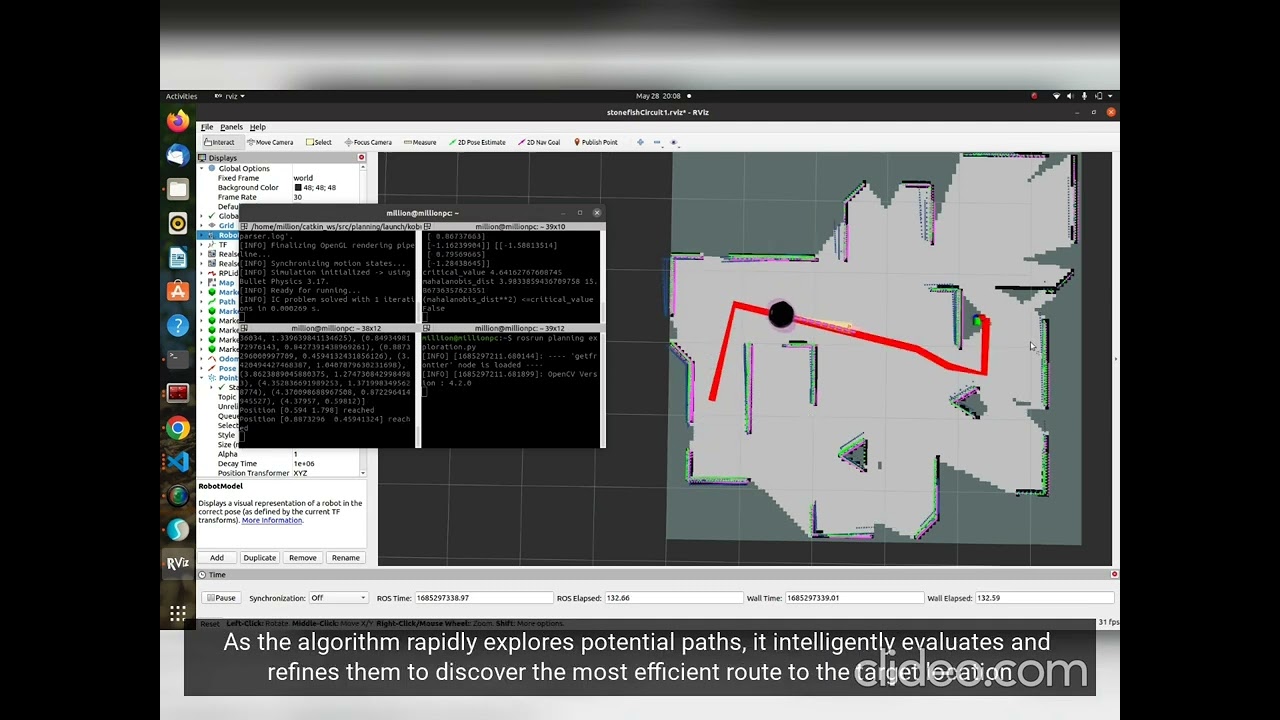
Autonomous Navigation of Mobile Robots: Integrating Lidar, RRT*, and Frontier-Based Algorithms for Path Planning, Exploration, and Motion Control. This project presents a comprehensive approach that combines Lidar sensing, Rapidly-exploring Random Trees* (RRT*), and Frontier-Based algorithms to achieve enhanced path planning, exploration, and motion control for mobile robots. The integration of these techniques addresses the challenges of obstacle avoidance, real-time decision-making, and efficient exploration, leading to improved autonomy and reliability in robotic systems.
More details at: [ Ссылка ]