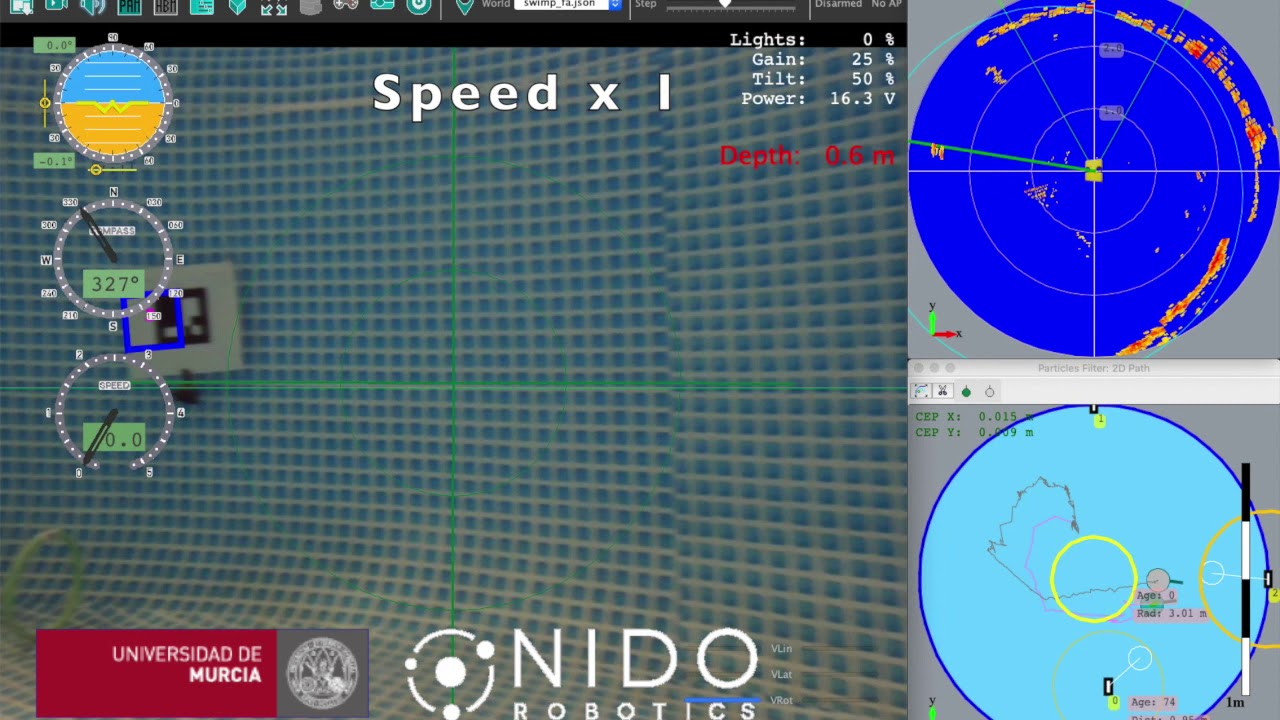
UMU-NIDO Joint project for underwater positioning. We process a 360 degrees sonar scanner, correcting for motion changes (rotations using an electronic compass, and translations using virtual odometry), and computing the best circle fit of the sonar data using a RANSAC algorithm. Then we feed a Monte Carlo algorithm with virtual odometry, vision based 11x11 Aruco markers, and the sonar circle fitting.