Title: Using inertial and magnetic sensors for hand tracking and rendering in wearable haptic (2015)
Authors: T. Lisini Baldi, M. Mohammadi, S, Scheggi, D. Prattichizzo.
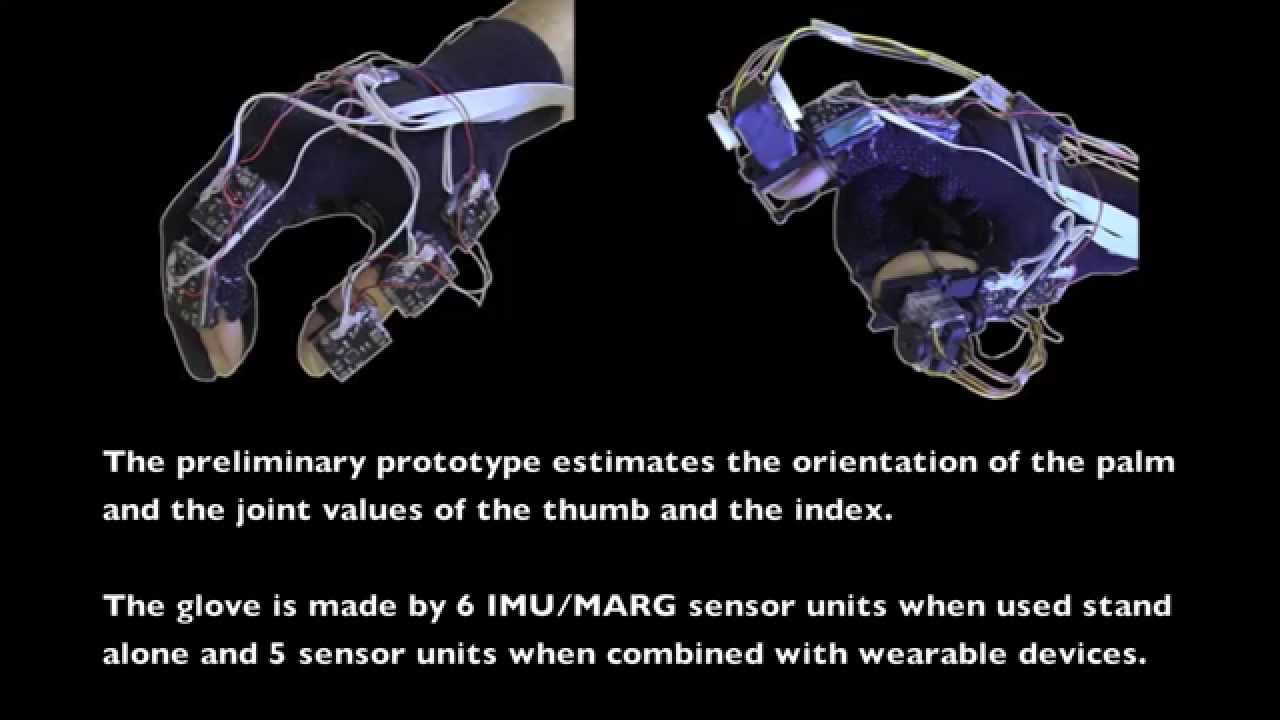
Abstract: In the last years, wearable haptic technologies became very promising since they provide the users with tactile force feedback via small, lightweight and wearable interfaces. However, they have no position sensing thus additional technologies are required. Motion capture systems or expensive sensing gloves have been used to compensate the lack of position sensing of these kind of devices. Recently, low cost hand tracking systems based on RGB-D cameras have been developed, however they suffer from lighting conditions and occlusions. In this paper we present a sensing glove based on inertial and magnetic sensors for hand tracking which can be combined with cutaneous devices for the rendering of the force feedback, thus producing a wearable sensing/actuation system. The sensing glove does not suffer from occlusion problems, it is wearable and cost effective however, since the employed sensors use the magnetometer to compensate the drift, they are sensitive to variations in the magnetic field. This property makes it challenging to interface the sensing glove with wearable devices since their motors generate variations in the magnetic field. Preliminary experiments showed the effectiveness of using inertial and magnetic sensors for hand tracking. A comparison between using the glove with and without the haptic devices was presented in order to compare the tracking performance when cutaneous devices are used.
Contacts: {lisini, scheggi, mohammadi, prattichizzo} (at) diism.unisi.it