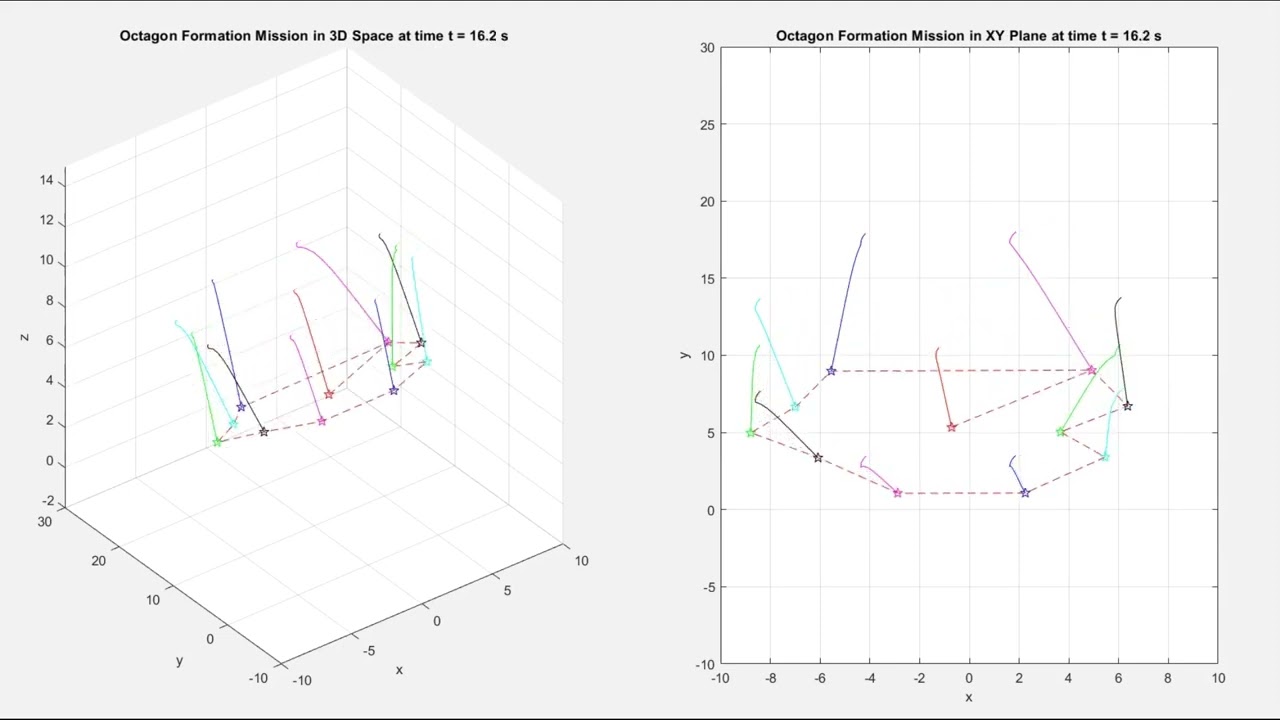
In My MS Research Project UAV (Quadcopter) Swarm Formation is achieved Using Multi-Agent Control. Collision avoidance is achieved also, Dozens of time-varying formations are made, In this video Word, the Octagon shape is formed with collision avoidance.
There is a leader in the centre and 10 followers drones.
First, the Leader goes 10-meter in height,
The Leader goes 10 meters in the y direction.
The leader starts rotating in a circle.
Then Leader Lands. while formation also follows the leader in each step.
Due to lake of Hardware, Controllers are implemented on Quadcopters and simulated in GAZEBO under the full Physics Engine. That means if Controllers were implemented on physical drones, the same formation will be achieved in the real world.
#matlab
#Multi-agentsConrol
#uav
#formation
#swarms
#quadcopter
#pieas
#octagon
#controlsystems
#controller