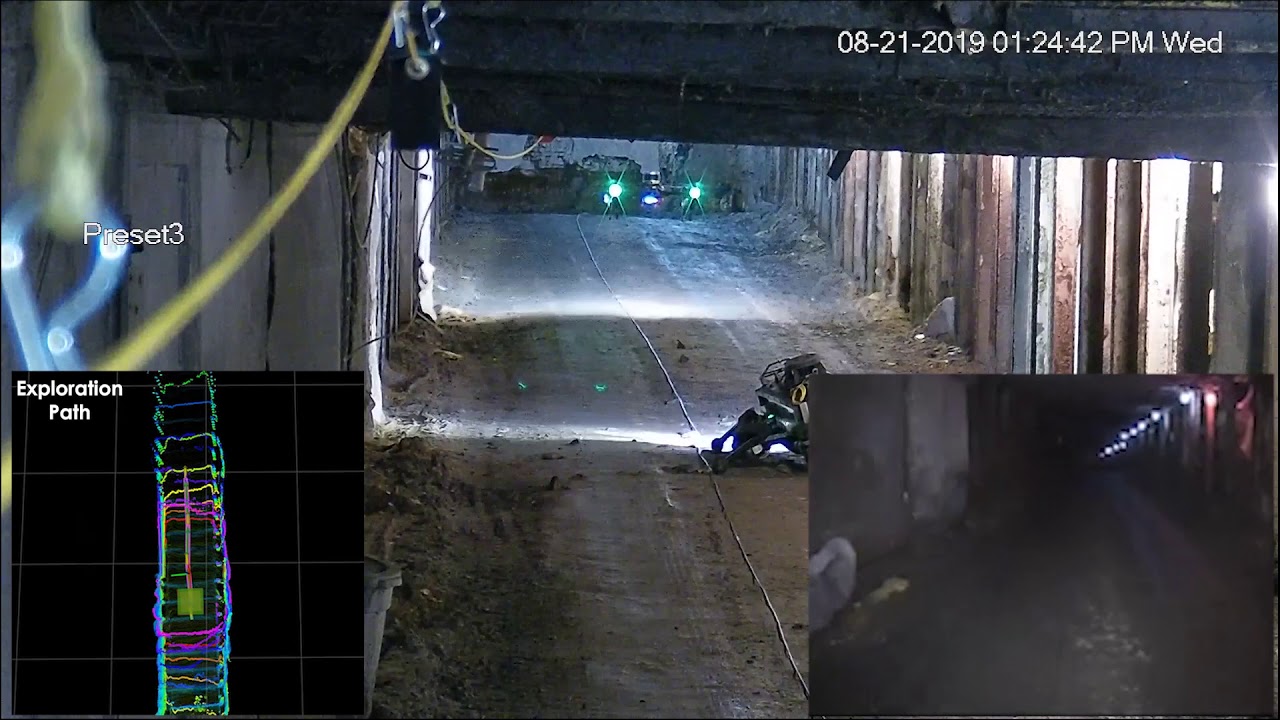
In this video we present an autonomous exploration deployment of our aerial robotic scouts inside an underground mine in Pittsburgh. The robot is utilizing the proposed Graph-based Exploration Planner to guide its motion so as to explore a first long segment inside this subterranean environment. The planner operates using its local exploration mode based on which it efficiently identifies paths that maximize the anticipated volumetric exploration gain, while simultaneously ensuring collision avoidance. Simultaneously, the methods builds a sparse global graph which in this mission was utilized towards its end in order to command a safe return-to-home path at a time appropriate for the remaining battery life of the system. The presented result took place in the framework of the Tunnel Circuit competition phase of the DARPA Subterranean Challenge.