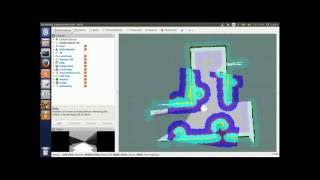
Simulation of a Turtlebot exploring and discovering a custom environment.
The moving base is a iRobot Create. The sensor was supposed to be a Asus Xtion Pro but the narrow fields of view makes it very hard for the robot to stay localized. If the robot gets lost, the whole thing falls apart. In this video, the sensor has been (unfairly) modified to have a wider FOV, although it retains the max range of 3.5m.
The navigation stack uses gmapping for SLAM and the frontier_exploration package for autonomous exploration.











![[FanCam 8K] FLYWITHME DAYA | 플윗미 다야 | 착장(3/5) | UMC X 팬더티비 모터쇼 5차 "WE ARE FLYWITHME" | 230128](https://i.ytimg.com/vi/kAtXuOzp5ME/mqdefault.jpg)