Unmanned underwater vehicles (UUVs) have become indispensable tools for inspection, maintenance, and repair operations in the underwater domain. The major focus and novelty of this work is collision-free autonomous navigation of UUVs in dynamically changing environments. Path planning and obstacle avoidance are fundamental concepts for enabling autonomy for mobile robots.
This remains a challenge, particularly for underwater vehicles operating in complex and dynamically changing environments. The elastic band method has been a suggested method for planning collision-free paths and is based on modelling the path as a dynamic system that will continuously be reshaped based on its surroundings.
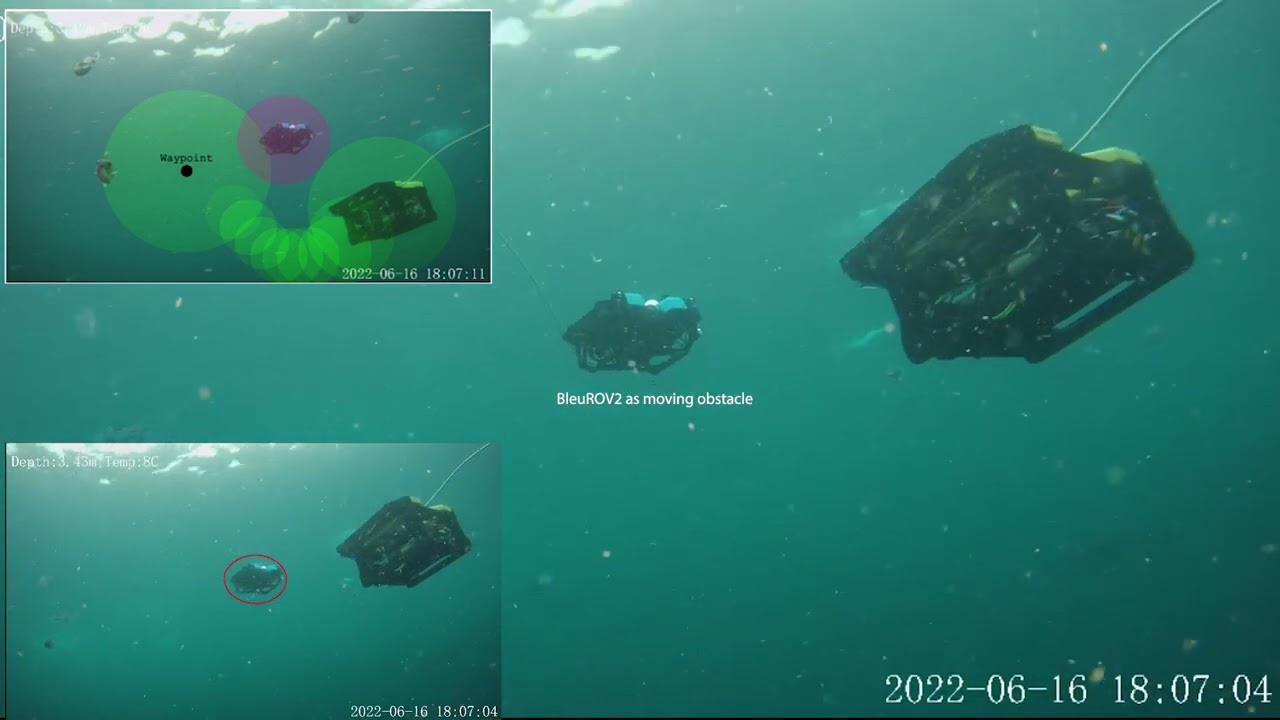
This paper proposes adaptations to the method for underwater applications and presents a thorough investigation of the method for 3D path planning and obstacle avoidance, both through simulations and extensive lab and field experiments. In the experiments, the method was used by a UUV operating autonomously at an industrial-scale fish farm and demonstrated that the method was able to successfully guide the vehicle through a challenging and constantly changing environment. The proposed work has broad applications for field deployment of marine robots in environments that require the vehicle to quickly react to changes in its surroundings.
This research was obtained as part of the CHANGE project.
→ [ Ссылка ]