Visit deepracing.ai for more info.
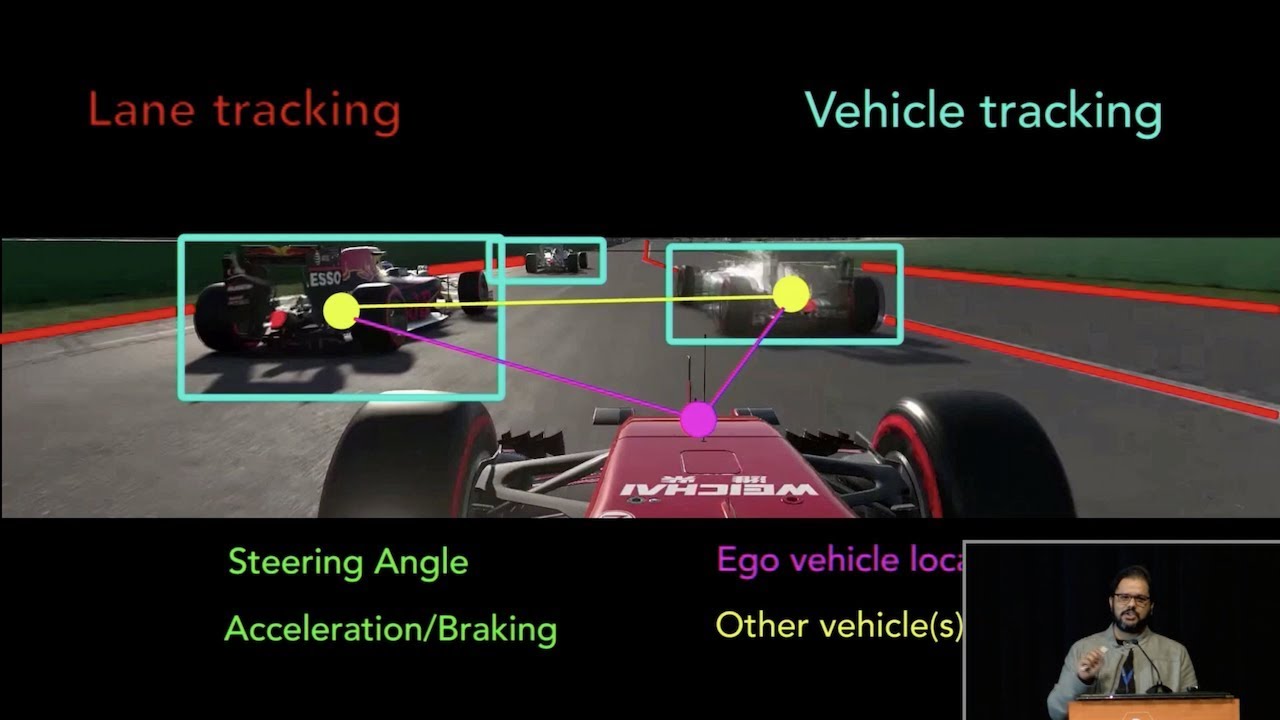
What would an autonomous car do if another vehicle swerves across multiple lanes without any indication? How about a high speed lane merge? or when the car in front of you brakes aggressively without warning? Or an obstacle appears at the last second in front of the car? One of the main obstacles with self-driving cars is, how to ensure that the car drives safely, and reliably in situations that don’t happen often in day to day driving, and are therefore difficult to gather data on. Fully autonomous driving really requires correct decision-making under unexpected situations. A car trained to follow the ’rules of the road’ will perform well most of the time, but it is the unusual conditions, the edge cases, that pose the hardest safety challenges. This is becoming increasingly critical as many of the algorithms which the car relies on to understand and asses traffic situations, and in some cases even issue control commands, they in turn rely on the knowledge of historical traffic situations that the car has seen and driven through before.
Professor Madhur Behl explains the research being done at the UVA Cyber-Physical Systems Link Lab, where we are teaching autonomous cars to learn how to drive at the limits of the control, and agility of the vehicle. The way we do that is by autonomously racing these cars against each other, both in highly photorealistic simulation and then on the 1/10 scale. Driving fast, and driving safely may seem as two very contradictory objectives, but the idea is not to drive fast all times, but enhance the autonomous vehicle with the ability to be able to brake aggressively and maneuver aggressively, when it encounters a safety critical situation.



![[Ep. 11] Understand SDL Event with Mouse motion, key presses, keycodes and scancodes | Intro to SDL2](https://i.ytimg.com/vi/EBHmMmiVtCk/mqdefault.jpg)